Abschlussprojekt von:
Weyrich Alexander / Simic Anton
Thema:
Konstruktion eines Palettenfördersystems und 2 Greifersystemen für eine Gehäuselinie
Projektbeschreibung
An der Gehäuselinie 4 soll in Zukunft das Gehäuse der neuen elektronischen Parkbremse in den Größen 15 Zoll, 16 Zoll und 17 Zoll gefertigt werden. Alle Maschinen dieser Fertigungslinie erhalten ein neues Spannkonzept, um dieses
Gehäuse an dieser Linie fertigen zu können. Die an uns gestellte Aufgabe beinhaltet die Neuentwicklung und Konstruktion der Greifersysteme der Kuka-Roboter, die für das Be- und Entladen der Maschinen 10/70 und 6/4 vorgesehen
sind. Zudem ist das bestehende Palletensystem abzuändern bzw. neu zu Konstruieren.
Anhand von vorliegendem Informationsmaterial wie z.B Konstruktionszeichnungen der neuen Spannvorrichtungen, Fertigungszeichnungen der neuen Gehäuse 15“, 16“ und 17“ und des neuen Maschinenlayouts kamen wir zu mehreren
Anforderungpunkten, die wir mit dem Technikbetreuer der Gehäuselinie 4, Peter Lewentz, in mehreren Sitzungen durchgearbeitet haben. Die folglich zu unseren Konzepten geführt haben.
Anforderungen die an uns gestellt wurden
- Neue Greifersyteme für die vorhandenen Kuka-Roboter sind möglichst im Leichtbau zu fertigen um die Achsen der Roboter zu schonen.
Greifersysteme kompatibel für 15, 16 und 17 Zoll Gehäuse fertigen.(möglichst ohne viele Wechselteile auskommen)
- Die Greifersysteme sind so zu konstruieren das das Be- und Entladen der zugehörigen Maschinen so wie das Be- und Entladen des zu konstruierenden Palletensystems möglich ist.
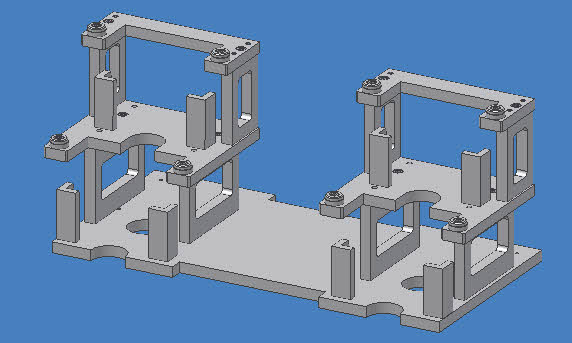
- Das Pallettensystem ist so zu ändern oder neu zu konstruiern das künftig 4 anstatt 2 Gehäuse wie bisher auf einer Palette transportiert werden können,
was eine bessere Zuordnung der einzelnen Maschinentakte von Maschine 10/70 gewährleistet.
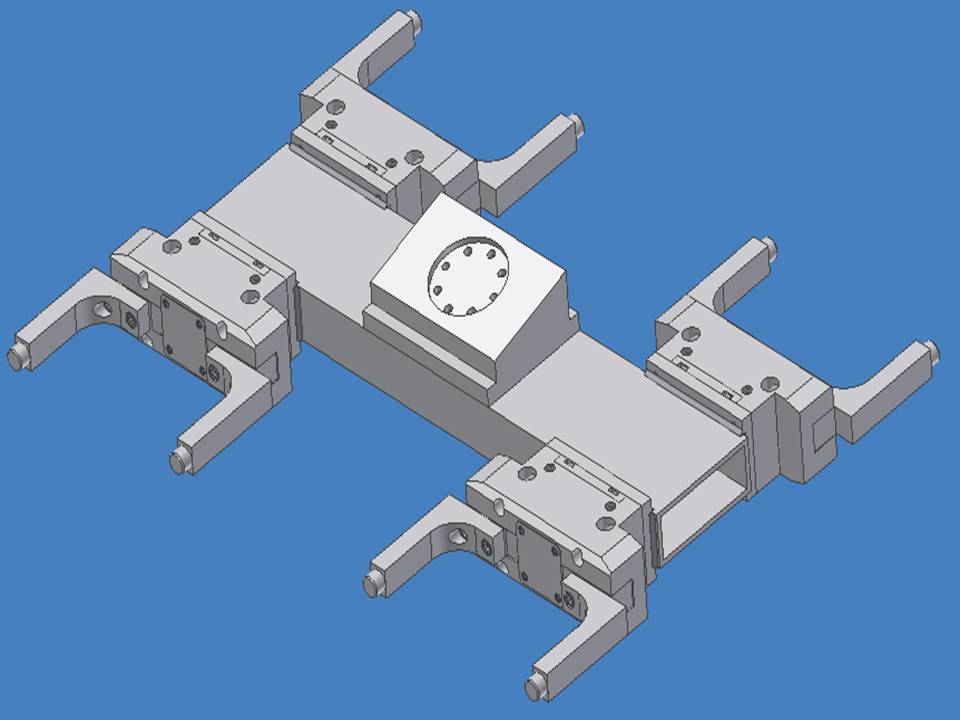
- Das Greifersystem des Roboters von Maschine 10/70 ist so zu konstruiern das eine möglichst geringe Baubreite des 4-fach Scharnierbandförderers, der die Rohteile zur Verfügung bereitstellt, gewährleistet ist aber gleichzeitig das Stichmass von
320mm der Mittelachsen der in der Maschine angeordneten Spannvorrichtungen eingehalten wird um das Be- und Entladen von 2 Gehäusen gleichzeitig zu ermöglichen.
Konzeptumsetzung
Greifersystem Maschine 10/70
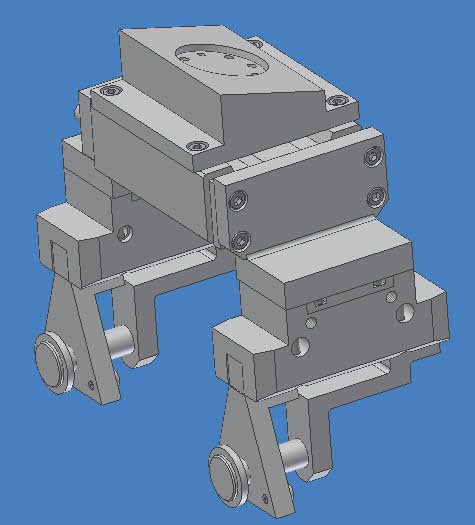
Greifersystem Maschine 6/4
Palettensystem